모두를 위한 머신러닝과 딥러닝의 강의
Lecture 4: Q-learning (table)
exploit&exploration and discounted future reward
import gym
import numpy as np
import matplotlib.pyplot as plt
from gym.envs.registration import register
register(
id='FrozenLake-v3',
entry_point='gym.envs.toy_text:FrozenLakeEnv',
kwargs={'map_name': '4x4',
# 아래 주석처럼 map을 정의해서 사용할 수도 있다.
#'desc':["SFFF","FHHF","FHFF","FFHF","FFHG"],
'is_slippery': False}
)
env = gym.make('FrozenLake-v3')
# Initialize table with all zeros
Q = np.zeros([env.observation_space.n, env.action_space.n])
# Discount factor
dis = .99
# Set learning parameters
num_episodes = 2000
# create lists to contain total rewards and steps per episode
rList = []
for i in range(num_episodes):
# Reset environment and get first new observation
state = env.reset()
rAll = 0
done = False
e = 1. / ((i // 100)+1)
# The Q-Table learning algorithm
while not done:
# Choose an action by e greedy
if np.random.rand(1) < e:
action = env.action_space.sample()
else:
action = np.argmax(Q[state, :])
# Q-learning 사용시 활성화 (바로 위 조건문 대신)
#action = np.argmax(Q[state, :] + np.random.randn(1, env.action_space.n) / (i + 1))
# Get new state and reward from environment
new_state, reward, done,_ = env.step(action)
# Update Q-Table with new knowledge using decay rate
Q[state,action] = reward + dis * np.max(Q[new_state,:])
rAll += reward
state = new_state
rList.append(rAll)
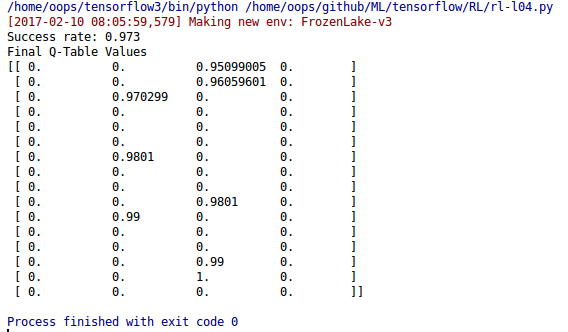
print("Success rate: " + str(sum(rList)/num_episodes))
print("Final Q-Table Values")
#print("LEFT DOWN RIGHT UP")
print(Q)
# edgecolor가 없으면 python2 에서 그래프가 검은색으로 표기된다.
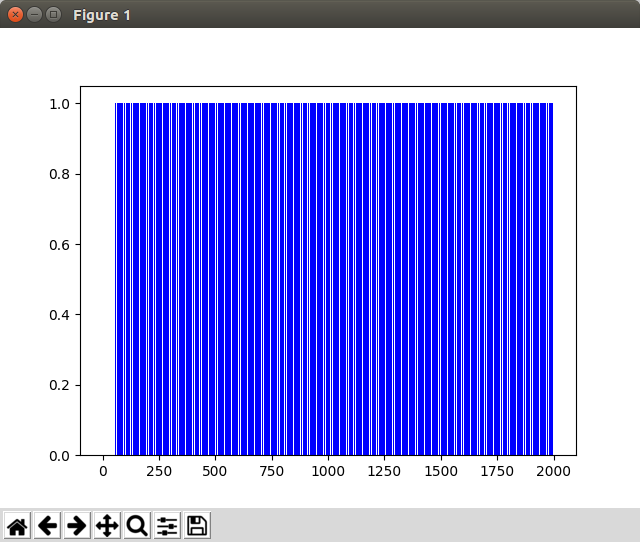
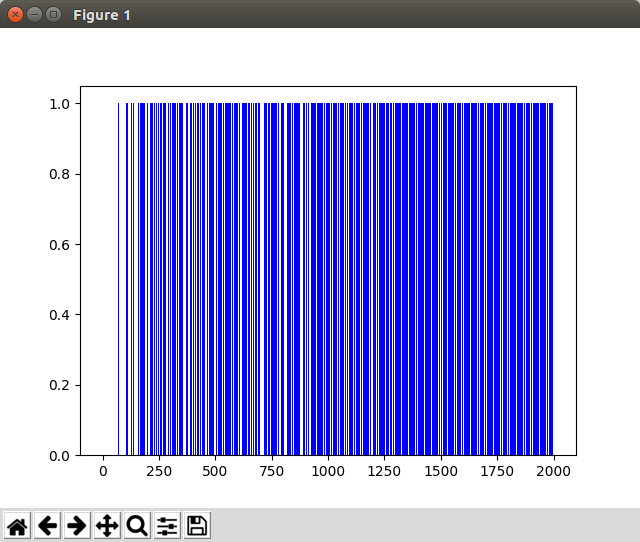
plt.bar(range(len(rList)), rList, color="blue", edgecolor='none')
plt.show()
Code: Q learning
실행 결과
그래프
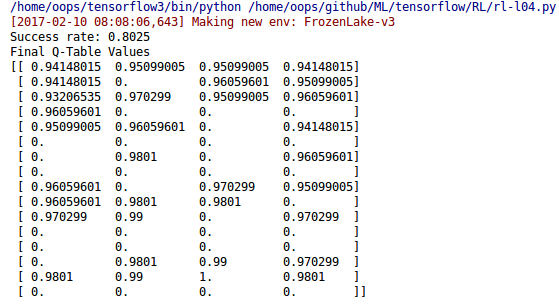
Code: e-greedy
실행 결과
그래프
실행 화면
30초 화면이라 짧지만, 뒤로 갈수록 실패가 적어진다. 테스트에서 사용된 episodes가 2000이니까 약 10~20%에 해당하는 count(100~200)가 진행된 이후로는 성공이 실패를 역전하게 된다.